图丨孙立宁院士团队 “微纳机器人关键技术与应用”项目 入选“2022中国智能制造十大科技进展”  图丨孙立宁院士代表团队领奖 智能制造“双十”科技进展 微纳机器人关键技术与应用 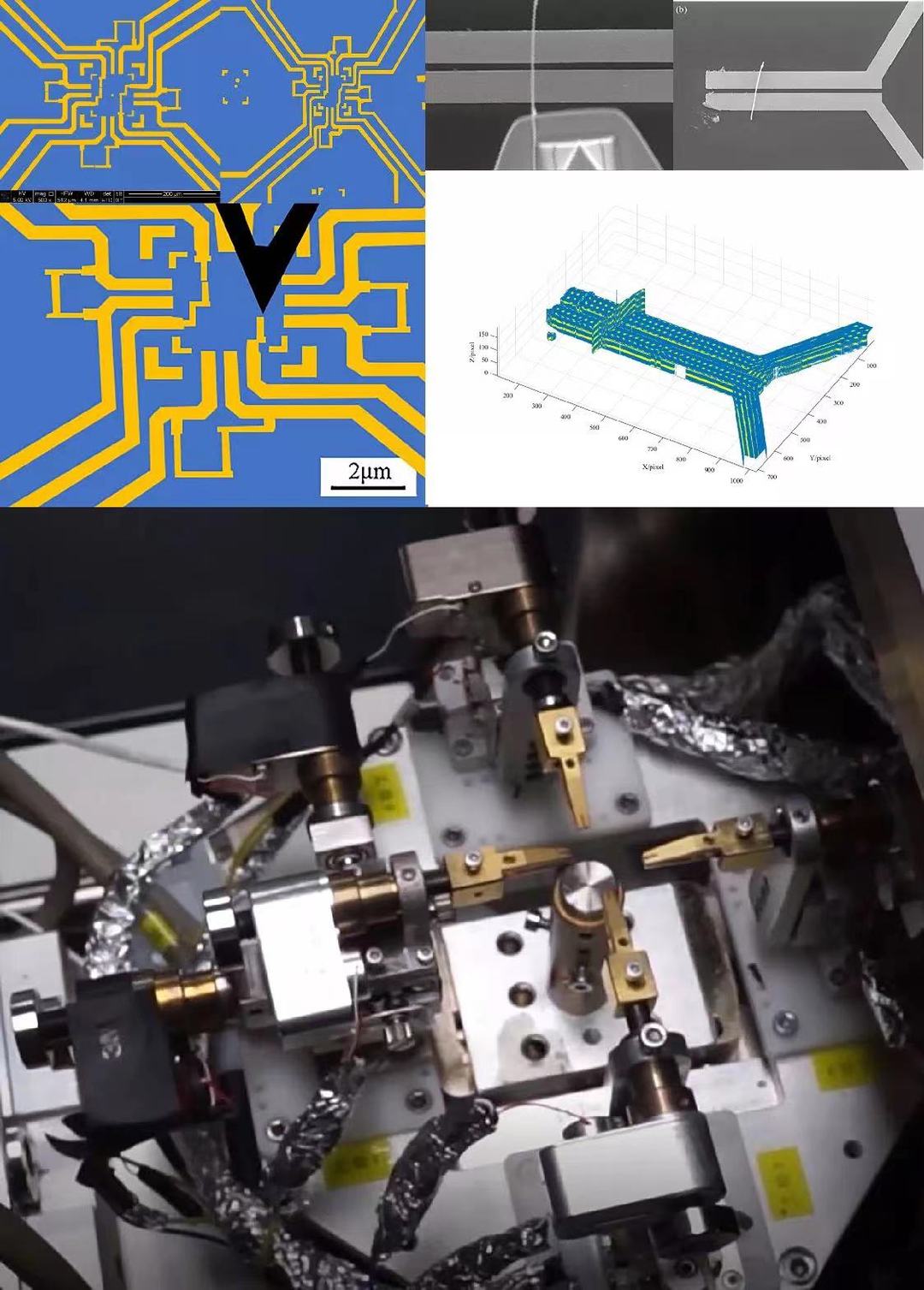 图丨微纳机器人关键技术与应用-图示 孙立宁院士 乐聚机器人首席科学家
俄罗斯工程院外籍院士,国家杰出青年基金、何梁何利基金科学与技术创新奖、全国创新争先奖状获得者,苏州大学机电工程学院院长,江苏省先进机器人技术重点实验室主任。 长期从事微纳机器人、工业机器人、医疗装备机器人前沿研究及产业化平台建设。在机器人结构、驱动与控制、作业机理与方法、系统集成等方面取得重要成果,并在微纳制造、生命科学及国防等领域得到成功应用;先后建立了微纳米机器人与系统集成研究平台、高性能工业机器人及机电一体化装备研究平台、医疗微创手术机器人集成研究平台;积极推动产学研一体化发展,实现了微纳技术装备产业化、工业机器人与自动化生产线产业化,微创外科手术机器人及家政服务机器人的示范应用,为机器人相关学科的创建与发展做出了卓越贡献,取得显著的经济效益和社会效益。 |